I had a hard time with my raspberry pi zero w after I got it up and running, and had to search many websites to figure things out. I will go over these items to have them handy in the future for when I forget it all.
Connect to multiple wireless networks with a Raspberry Pi
I needed my pi to connect to multiple networks while I was working on it, and finally got it figured out with the site above.
NOTE: The pi won’t connect to 5 GHz wireless networks, only the 2.5 GHz. As of this writing anyway…
In a nutshell:
The OS uses the /etc/wpa_supplicant/wpa_supplicant.conf file to manage wireless networks. You need to add extra networks as above. Name the different networks to something that makes sense to you (“home” and “dad” in the example above) with the addition of the id_str=”name” string. (I am unsure whether you can use another variable name other than id_str, so stick with it.)
You also need to edit the /etc/network/interfaces file. This basically allows you to point to the new network names you designated. Insert pic here. If your file is different (mine was) just take this verbatim while changing names to what you designated in the wpa_supplicant.conf file.
The link page explains it more in detail, but this is a nutshell and more information would spill out.
Raspberry Pi Servo Jitter
I wanted to run a tiny servo with the Pi, but found the way I set it up initially was too jerky to be of use. It comes from the Pi not really being meant to control servos.
I found with further research that using pigpio was the answer for smooth servo action run by the Pi. The caveat is that it is best for small 9 gram servos and likely only one.
NOTE: You run pigpio via python scripts. Do you know python? I don’t.
So the nutshell is…
Install pigpio on the Pi via command line:
sudo apt-get update (to update the Pi to latest repositories)
sudo apt-get install python3-pigpiosudo systemctl enable pigpiod (to set the pigpio daemon to auto start on boot if appropriate)
OR
sudo pigpiod (to run the daemon manually)
Raspberry Pi pinout
Pigpio uses the GPIO or Broadcom numbering instead of the physical numbering of the pin outs. For example in my case, I was using physical pin out 11, but the GPIO number was 17. It caused some consternation when the scripts didn’t work at first.
how-to-run-pigpiod-on-bootA minimal kiosk mode for a Raspberry Pi
UPDATE 040122:
I found that my pi had stop booting and had to reinstall the “minimal kiosk mode” from scratch. When I placed it back on the monitor, the resolution was not correct. I did a LOT of searching and didn’t find any satisfactory answers as to what happened, but I did find a LOT of things to try that didn’t work for me. <frustration>
I finally had to tell the pi what the resolution was supposed to be and that seemed to work mostly, but it didn’t take away the bars on each side of the screen. I kind of fixed it, so I will document it here, but I’m not super happy with it.
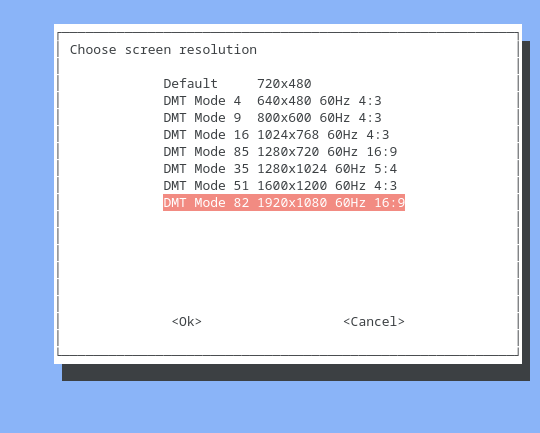
To tell the pi what the resolution is supposed to be, go into raspi-config by typing sudo raspi-config on the commandline. Go to Display options and Resolution to find the below.
Choose what is pertinent and hit ok.
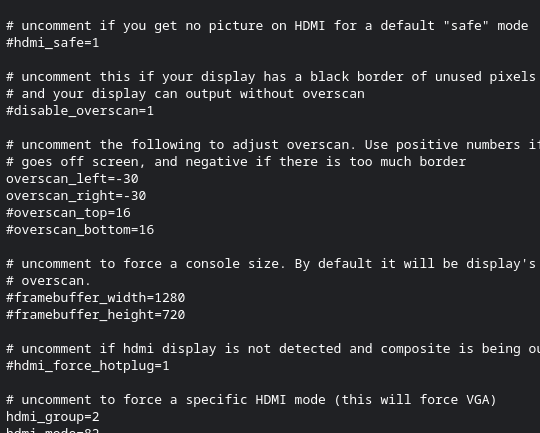
I also made some changes to the /boot/config.txt file to help minimize the bars on either side of the screen. It helped but is not the slam dunk I wanted. View the file:
sudo vi /boot/config.txt,
and change the overscan left and right values.
Should I have changed the top and bottom? I don’t know, should I? The top and bottom didn’t have the issue, so I didn’t. Sue me (don’t sue me I have no money).
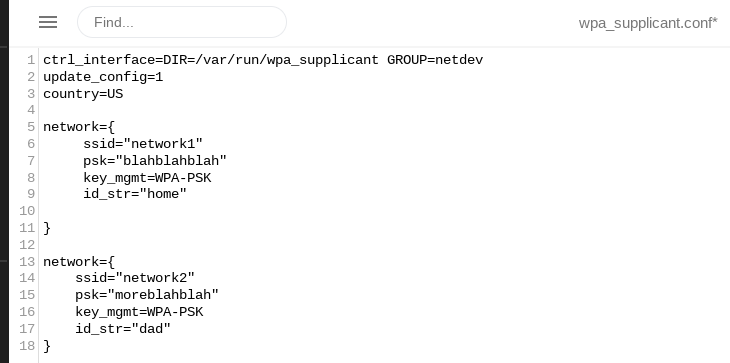 You need to add extra networks as above. Name the different networks to something that makes sense to you (“home” and “dad” in the example above) with the addition of the id_str=”name” string. (I am unsure whether you can use another variable name other than id_str, so stick with it.)
You also need to edit the /etc/network/interfaces file. This basically allows you to point to the new network names you designated. Insert pic here. If your file is different (mine was) just take this verbatim while changing names to what you designated in the wpa_supplicant.conf file.
The link page explains it more in detail, but this is a nutshell and more information would spill out.
Raspberry Pi Servo Jitter
I wanted to run a tiny servo with the Pi, but found the way I set it up initially was too jerky to be of use. It comes from the Pi not really being meant to control servos.
I found with further research that using pigpio was the answer for smooth servo action run by the Pi. The caveat is that it is best for small 9 gram servos and likely only one.
NOTE: You run pigpio via python scripts. Do you know python? I don’t.
So the nutshell is…
Install pigpio on the Pi via command line:
sudo apt-get update (to update the Pi to latest repositories)
sudo apt-get install python3-pigpio
sudo systemctl enable pigpiod (to set the pigpio daemon to auto start on boot if appropriate)
OR
sudo pigpiod (to run the daemon manually)
Raspberry Pi pinout
Pigpio uses the GPIO or Broadcom numbering instead of the physical numbering of the pin outs. For example in my case, I was using physical pin out 11, but the GPIO number was 17. It caused some consternation when the scripts didn’t work at first.
how-to-run-pigpiod-on-boot
A minimal kiosk mode for a Raspberry Pi
UPDATE 040122:
I found that my pi had stop booting and had to reinstall the “minimal kiosk mode” from scratch. When I placed it back on the monitor, the resolution was not correct. I did a LOT of searching and didn’t find any satisfactory answers as to what happened, but I did find a LOT of things to try that didn’t work for me. <frustration>
I finally had to tell the pi what the resolution was supposed to be and that seemed to work mostly, but it didn’t take away the bars on each side of the screen. I kind of fixed it, so I will document it here, but I’m not super happy with it.
To tell the pi what the resolution is supposed to be, go into raspi-config by typing sudo raspi-config on the commandline. Go to Display options and Resolution to find the below.
You need to add extra networks as above. Name the different networks to something that makes sense to you (“home” and “dad” in the example above) with the addition of the id_str=”name” string. (I am unsure whether you can use another variable name other than id_str, so stick with it.)
You also need to edit the /etc/network/interfaces file. This basically allows you to point to the new network names you designated. Insert pic here. If your file is different (mine was) just take this verbatim while changing names to what you designated in the wpa_supplicant.conf file.
The link page explains it more in detail, but this is a nutshell and more information would spill out.
Raspberry Pi Servo Jitter
I wanted to run a tiny servo with the Pi, but found the way I set it up initially was too jerky to be of use. It comes from the Pi not really being meant to control servos.
I found with further research that using pigpio was the answer for smooth servo action run by the Pi. The caveat is that it is best for small 9 gram servos and likely only one.
NOTE: You run pigpio via python scripts. Do you know python? I don’t.
So the nutshell is…
Install pigpio on the Pi via command line:
sudo apt-get update (to update the Pi to latest repositories)
sudo apt-get install python3-pigpio
sudo systemctl enable pigpiod (to set the pigpio daemon to auto start on boot if appropriate)
OR
sudo pigpiod (to run the daemon manually)
Raspberry Pi pinout
Pigpio uses the GPIO or Broadcom numbering instead of the physical numbering of the pin outs. For example in my case, I was using physical pin out 11, but the GPIO number was 17. It caused some consternation when the scripts didn’t work at first.
how-to-run-pigpiod-on-boot
A minimal kiosk mode for a Raspberry Pi
UPDATE 040122:
I found that my pi had stop booting and had to reinstall the “minimal kiosk mode” from scratch. When I placed it back on the monitor, the resolution was not correct. I did a LOT of searching and didn’t find any satisfactory answers as to what happened, but I did find a LOT of things to try that didn’t work for me. <frustration>
I finally had to tell the pi what the resolution was supposed to be and that seemed to work mostly, but it didn’t take away the bars on each side of the screen. I kind of fixed it, so I will document it here, but I’m not super happy with it.
To tell the pi what the resolution is supposed to be, go into raspi-config by typing sudo raspi-config on the commandline. Go to Display options and Resolution to find the below.